Die Herausforderung ist: Die Fehlertoleranz bei den Entscheidungen, die das autonomfahrende Vehikel trifft, muss gegen null gehen. Denn es geht dabei letztendlich immer um die Sicherheit sämtlicher Verkehrsteilnehmer. Das macht die Aufgabe umso anspruchsvoller. Der Weg dem Maschinen-Hirn künstliche Intelligenz einzubläuen, ist steinig. Und das ist noch untertrieben. "Wir erziehen die Software wie ein Kind und sagen, wann es auf welche Situation, wie zu reagieren hat", sagt Nvidias Automotive-Chef Danny Shapiro. Dabei wird der "Heranwachsende" mit Millionen von Bildern gefüttert und das richtige Verhalten einprogrammiert. Diese Entscheidungen werden dann in riesigen Datenbanken gespeichert. Immer wieder werden Verkehrssituationen durchgespielt und Menschen überwachen, ob die Software auch richtig reagiert. Das Ziel ist, das das Auto anhand von erlernten Mustern ähnliche Situationen perfekt löst. "Diese Muster sind nichts anderes als die menschliche Intuition", erklärt Michael Fausten, der bei Bosch das autonome Fahren verantwortet.
 (Foto: press-inform / Kia) |  (Foto: press-inform / ZF) | 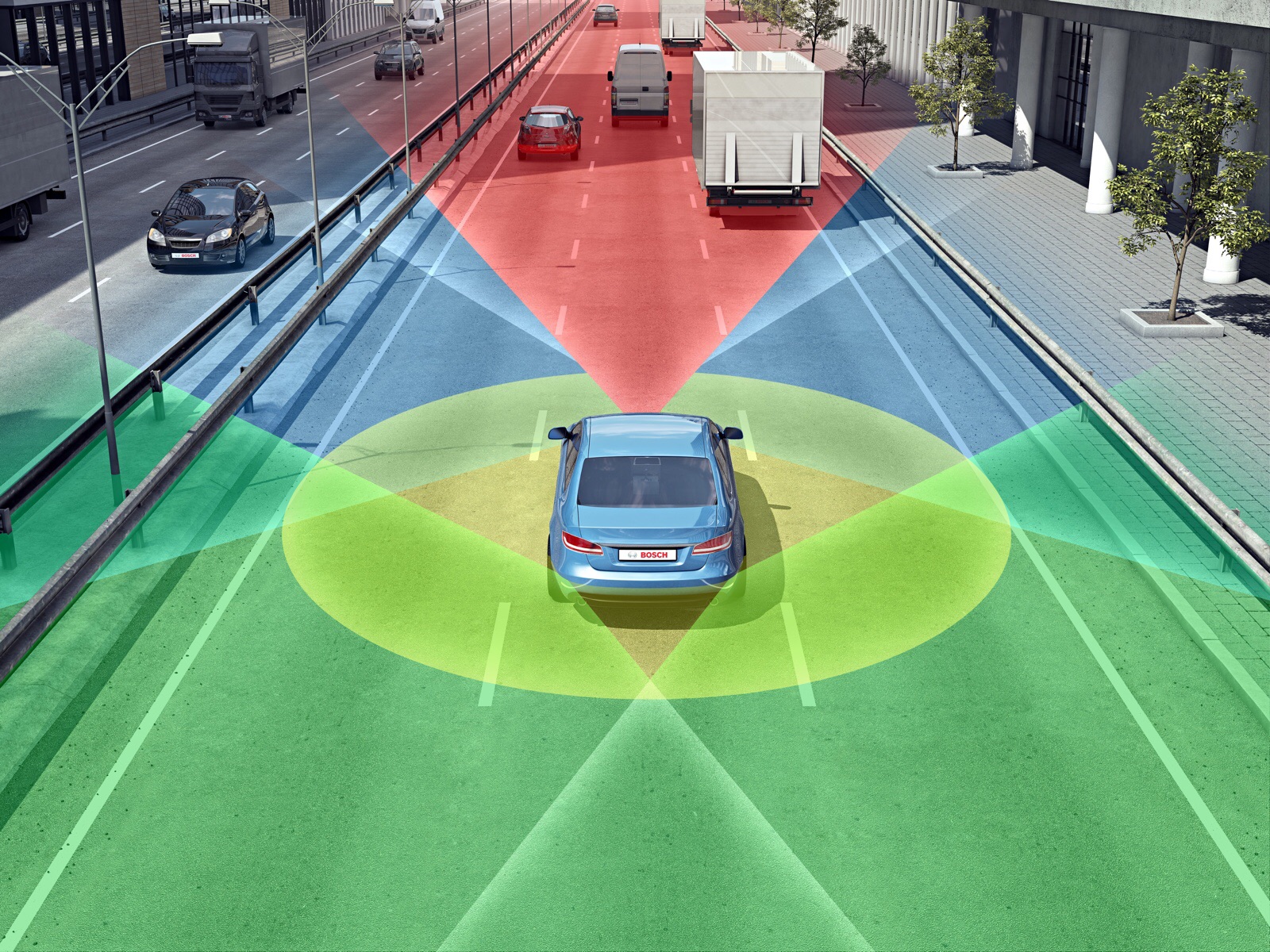 (Foto: Bosch) |
 (Foto: press-inform / Audi) |  (Foto: press-inform / Audi) | 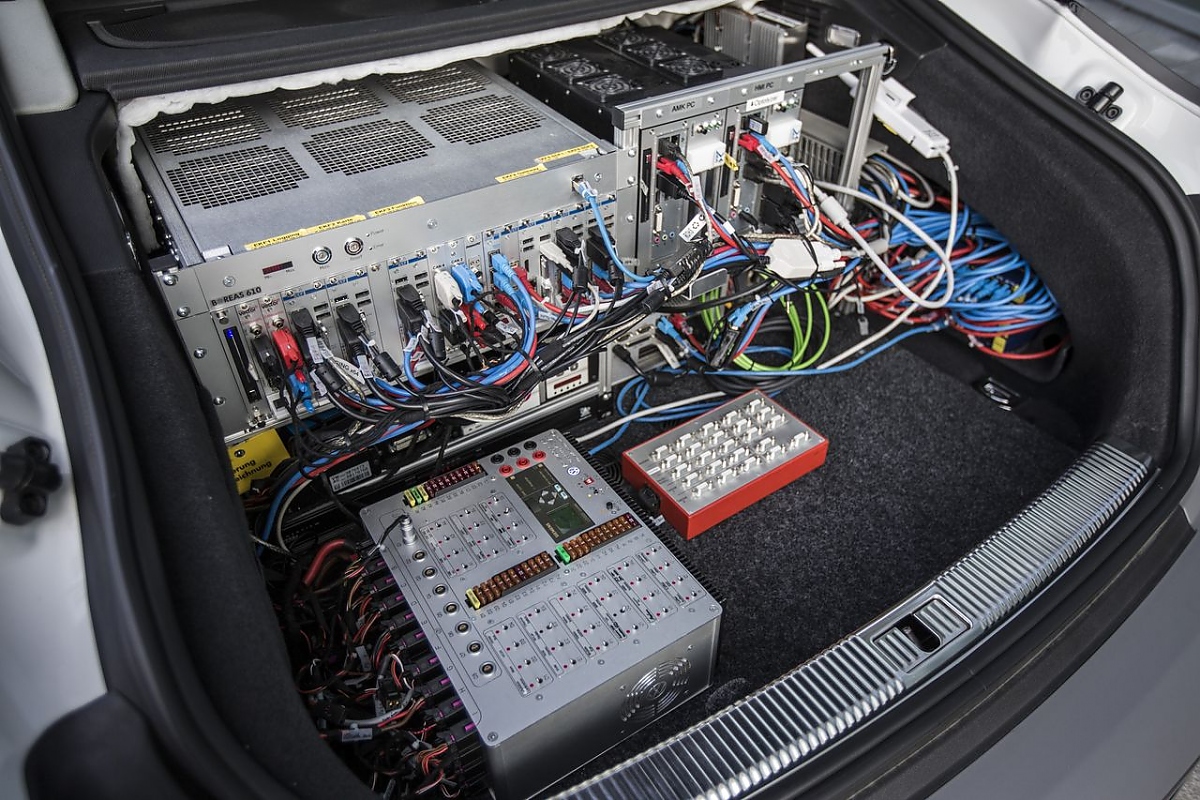 (Foto: press-inform / Audi) |
Die Programmierlogik dieser Software unterscheidet sich grundlegend vom altbekannten "wenn", "dann", wie wir es heute kennen. Das bedeutet, dass der Mensch dem Auto für jeden Fall eine Lösung vorgibt und diese im System hinterlegt. Das kann beim autonomen Fahren und der unglaublichen Vielzahl von Situationen, die im Straßenverkehr tagtäglich vorkommen, nicht klappen. "Künstliche Intelligenz hat den Vorteil, aufgrund von erlerntem Wissen, ähnliche Verkehrssituationen zu erkennen", verdeutlicht Dr. Gerhard Gumpoltsberger, Leiter des Innovationsmanagements bei ZF, der gemeinsam mit Nvidia am autonomen Fahren tüftelt. Schließlich hängen von dem Können des Robo-Piloten Menschenleben ab. "Es ist ein großer Unterschied, ob Sie künstliche Intelligenz in einem Consumer- oder sicherheitsrelevanten Bereich anwenden, wie das Auto und der Verkehr das sind", macht Michael Fausten klar.
Fotos: press-inform / Nvidia
- Details
- Geschrieben von wolfgang-gomoll
- Veröffentlicht: 22. Januar 2017